
审查过程中,往往会将与技术特征相近的现有技术来等同该技术特征,认定专利缺乏创造性,而缺乏创造性的认定也是审查意见通知书中最常见的问题。
那这些看似等同的技术特征是否真的就是完全相同呢?
答案:不一定。
这就是经常出现在审查意见通知书中的“文字陷阱”。
《专利审查指南》中规定了创造性问题可通过“三步法”进行答复:
(1)确定最接近的现有技术;
(2)确定发明的区别特征和发明实际解决的技术问题;
(3)判断要求保护的发明对本领域的技术人员来说是否显而易见。
找出正确的区别特征是识别这些“文字陷阱”的关键点,也是该发明授权的关键点。
下面结合具体案例来详细谈一谈。
本申请:名称为“一种基于图算法的行车路线挖掘方法”。
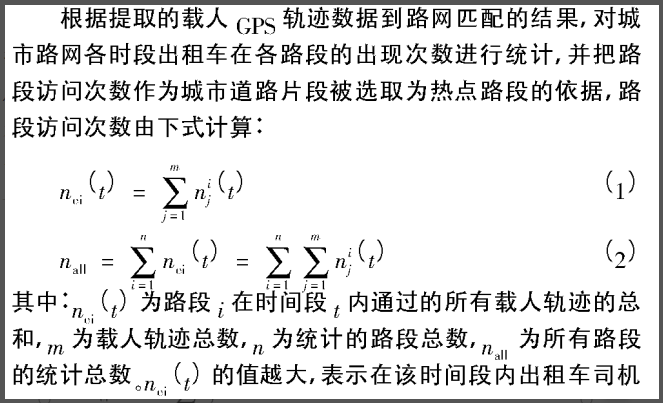
审查员意见通知书中认定的最接近的现有技术(下述用D1表示)的主要内容如下:
本申请的主要技术特征
将所述车辆的轨迹图中两点间通过的车辆数量转化为代价值,并求解最小代价值得到最优路径,其中代价函数为![]()
,式中x为每条路径的通过车辆数的相反数。
计算过程为:
所述车辆为N辆,每辆车走过的的轨迹包含M个点,路径为L;点

和相邻点

之间通过的所述车辆的数量表达式为:
;对连通所述路径L上相邻点间通过的所述车辆的数量求和,表达式为:
通过求解最小代价值,得到K组最大值,即为所述K条最优路径。
审查意见通知书中认定D1中的m为载人轨迹总数相当于本申请中的车辆为N辆,D1中的n为统计的路段总数相当于本申请中每辆车走过的轨迹包含M个点。
具体论述
1
本申请中将整张地图或者指定区域存在的车辆记作N,每辆车走过的轨迹包含的点数记作M,设定点
和相邻点
,计算两个相邻点之间的车辆数,再计算路径L上相邻点间通过的车辆数的总和,本申请中的计算的最小单元划分到轨迹中的点,一条轨迹中存在多个点,而两个相邻点之间的路段可能为多个轨迹的重合路段,所以精准到轨迹中的相邻点之间的车辆数,可以更加精准的计算出最优路径。
2
D1中的n表示为统计的路段总数,也就是路段i在时间段t内所有载人轨迹,而本申请中的M表示为轨迹中的点数,D1中最小单位限定为轨迹数,本申请中的最小单位限定为轨迹中的两点之间的车辆数,所以本申请中计算相邻两点间的车辆数比D1中计算每条轨迹中的车辆数算出的最优路径更加精准。
3
而在现有技术中,对于如何精准选择危险品运输的最短路径,包括在D1基础上精准计算出各个轨迹中车辆数量,来提高最优路径选择的准确度,或者是采用更精准的算法来提高最优路径的选择等,但是轨迹内部某个路段的车辆数与被选择的最优路径中的某个路段中的车辆数还是没有办法进行比较,可能还会存在更优路径没有被发现,导致最优路径选择存在偏差。
总 结










暂无评论内容